Функциональная схема управления привода, расчет динамических характеристик и математическая модель привода
Рисунок 2.12
Переходный процесс
При входном сигнале соответствующему 3,3В
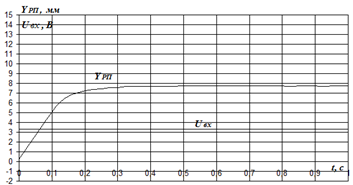
Рисунок 2.13
Переходный процесс
При входном сигнале соответствующему -3,3В
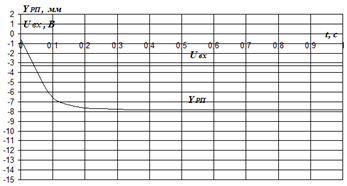
Рисунок 2.14
Переходный процесс.
При входном сигнале соответствующему 5В
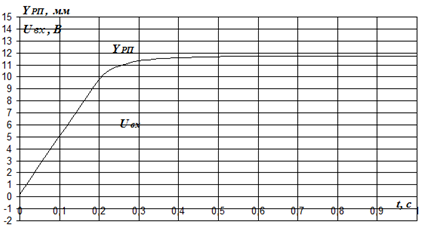
Рисунок 2.15
Переходный процесс.
При входном сигнале соответствующему -5В
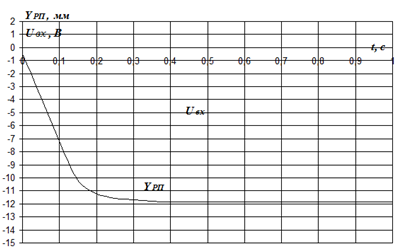
Рисунок 2.16
Материалы о транспорте:
Определение проектных величин коэффициентов технической готовности и
использования автомобилей
Коэфициэнт технической готовности. Количество дней эксплуатации автомобиля за цикловой пробег Количество дней простоя автомобиля в ТО и ТР за цикл Дни простоя в КР DКР=dКР+dтранс Дни транспортировки ...
Планировка автотранспортного предприятия
В данном случае на листе формата А1 я показал схему генерального плана автотранспортного предприятия. Предприятие выполняет услуги по перевозке различных товаров, грузов; Преимущества данного генерал ...
Путевая устойчивость самолета
Способность самолета без вмешательства летчика восстанавливать первоначальное состояние путевого равновесия называется путевой устойчивостью. При нарушении путевого равновесия самолет начнет разворач ...
Навигация
- Главная
- Устройство и эксплуатации железнодорожного пути
- Многоковшовые экскаваторы
- Антикоррозийная обработка
- Международные транспортные коридоры
- Интеллектуальные транспортные системы
- Автомобильные бензины
- Материалы
- Карта сайта