Функциональная схема управления привода, расчет динамических характеристик и математическая модель привода
Блок-схема управления и привода приведена на рис.13, где используются следующие обозначения:
![]() – сигнал управления на входе привода;
– сигнал управления на входе привода;
![]() – сигнал позиционной обратной связи по выходному звену гидродвигателя;
– сигнал позиционной обратной связи по выходному звену гидродвигателя;
![]() – сигнал ошибки внешнего контура управления;
– сигнал ошибки внешнего контура управления;
![]() – сигнал управления на входе сервопривода (ЭГУ);
– сигнал управления на входе сервопривода (ЭГУ);
![]() – сигнал позиционной обратной связи по выходному звену сервопривода ( золотника ЭГУ) ;
– сигнал позиционной обратной связи по выходному звену сервопривода ( золотника ЭГУ) ;
![]() – сигнал ошибки внутреннего контура управления;
– сигнал ошибки внутреннего контура управления;
![]() - перемещение золотника ЭГУ.
- перемещение золотника ЭГУ.
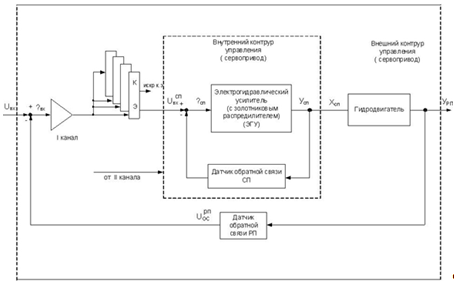
Рисунок 2.6
Сервопривод, содержащий электрогидравлический усилитель мощности (ЭГУ), раздельно управляет током в обмотках ЭГУ и имеет позиционную обратную связь по датчику перемещения золотника ЭГУ. Это составляет внутренний контур управления соответствующего канала.
Внешний контур управления канала образуется датчиком позиционной обратной связи, охватывающим привод с выхода на его вход.
Для обеспечения совместной работы каналов управления привода, включая индикацию и отключение неисправного канала, используется встроенная система контроля (ВСК) Существуют различные схемы ее реализации. В соответствии со схемой на рис.15 в цепь сигнала ошибки ![]() внешнего контура каждого канала привода включается монитор, обеспечивающий контроль входного сигнала
внешнего контура каждого канала привода включается монитор, обеспечивающий контроль входного сигнала ![]() по приемнику “канал-модель” (для “модельного канала используется дополнительный сигнал с ДОС РП, который автономно контролируется своим монитором. Контроль работы сервопривода осуществляется адаптивной электронной моделью, выход которой подается на специальный монитор контроля внешнего контура (ЭГУ).
по приемнику “канал-модель” (для “модельного канала используется дополнительный сигнал с ДОС РП, который автономно контролируется своим монитором. Контроль работы сервопривода осуществляется адаптивной электронной моделью, выход которой подается на специальный монитор контроля внешнего контура (ЭГУ).
По условием работы привода целесообразно использовать совместную работу его каналу с раздельным подключением обмоток ЭГУ ( при этом вторая обмотка ЭГУ находится в горячем резерве Y=0. Это позволяет рассматривать характеристики привода как работу его одного канала.
В линейном приближении рассматривается схема ненагруженного привода c достаточной степенью точности описана следующей системой уравнений:
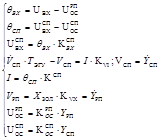 (1)
(1)
где: ![]() - скорости выходных звеньев гидродвигателя и сервопривода соответственно;
- скорости выходных звеньев гидродвигателя и сервопривода соответственно;
![]() - постоянная времени ЭГУ;
- постоянная времени ЭГУ;
![]() - ток управления на входе ЭГУ;
- ток управления на входе ЭГУ;
![]() - коэффициенты усиления электронных усилителей во внешнем и внутреннем контурах привода;
- коэффициенты усиления электронных усилителей во внешнем и внутреннем контурах привода;
![]() - коэффициенты передачи позиционных обратных связей во внешнем и внутреннем контурах привода соответственно;
- коэффициенты передачи позиционных обратных связей во внешнем и внутреннем контурах привода соответственно;
![]() - коэффициенты наклона скоростных характеристик гидродвигателя привода и перемещения золотника ЭГУ (сервопривода) соответственно.
- коэффициенты наклона скоростных характеристик гидродвигателя привода и перемещения золотника ЭГУ (сервопривода) соответственно.
При составление уравнений принималось, что ЭГУ сервопривода в рассматриваемой области частот с достаточной степенью точности может быть представлен линейной динамической системой первого порядка с постоянной времени Тэгу. Это допущение подтверждено многочисленными результатами экспериментальных исследований. В работах показывается справедливость использования данного допущения для современных ЭГУ в полосе частот до 30Гц, также и в области малых сигналов - ![]() .
.
Материалы о транспорте:
Характеристика детали
Подвески тормозных башмаков, имеющие диаметр поперечного сечения в местах наибольшего износа менее 22 мм, а по усиленному сечению в углах гиба менее 26 мм, а также подвески, у которых при дефектоскоп ...
Расчет фонда заработной платы
Для определения величины тарифного заработка пользуются тарифными ставками, приведенными в табл.3.10 [1,стр.20]. Среднечасовая тарифная ставка определяется по формуле: Ссрч=Спр+(Спс - Спр)×(Рср ...
Транспортная характеристика
грузопотоков
Транспортная характеристика грузопотоков включает объем, направление, структуру, партионность и степень равномерности, причем каждая из этих характеристик обуславливает определенные требования к сост ...
Навигация
- Главная
- Устройство и эксплуатации железнодорожного пути
- Многоковшовые экскаваторы
- Антикоррозийная обработка
- Международные транспортные коридоры
- Интеллектуальные транспортные системы
- Автомобильные бензины
- Материалы
- Карта сайта