Функциональная схема управления привода, расчет динамических характеристик и математическая модель привода
Рассмотрим основные особенности динамических характеристик привода в области малых величин входного сигнала при наличии нелинейностей.
Нелинейные искажения АФЧХ привода в области малых сигналов обусловлены, в основном, нелинейностями скоростных характеристик гидродвигателя и сервопривода, а также люфтами в механической передаче сервопривода и узлах соединения датчика обратной связи гидродвигателя с его выходным звеном. В работе показывается, что в области малых входных сигналов, за исключением околонулевых ее значений, экспериментальныx АФЧХ привода c достаточной степенью точности согласуется с расчетным, полученными на основе метода гармонической линеаризации зон нечувствительности скоростных характеристик гидродвигателя сервопривода. При этом в большинстве случаев эквивалентная передаточная функция привода с учетом коэффициентом гармонической линеаризации имеет тот же вид, что и передаточная функция (2), где вместо добротностей ![]() и
и ![]() , рассчитанных для линейной области АФЧХ привода, используется эквивалентные значения добротностей
, рассчитанных для линейной области АФЧХ привода, используется эквивалентные значения добротностей ![]() и
и ![]() (
(![]() ), зависящие как от амплитуды входного сигнала
), зависящие как от амплитуды входного сигнала![]() , так и от частоты колебаний
, так и от частоты колебаний ![]() .
.
Структурная динамическая схема привода с зонами нечувствительности скоростных характеристик гидродвигателя и сервопривода показана на рис 16.
Заметим, что, в рамках такой нелинейной структурной динамической схемы привода, если привод устойчив в линейной области, то он остается устойчивым и в нелинейной области при малых ![]() , так как в этом случае значение его критической добротности
, так как в этом случае значение его критической добротности ![]() , определяемое формулой (4) остается неизменным.
, определяемое формулой (4) остается неизменным.
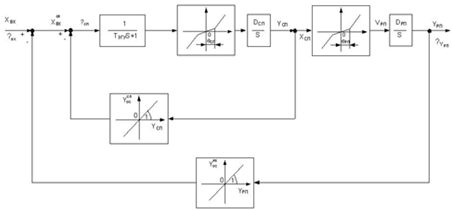
Рисунок 2.7
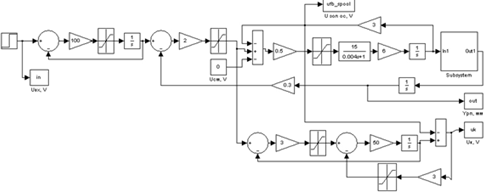
Рисунок 2.8 - Схема привода РПД-28 с подсистемой нелинейной характеристики
Скоростная характеристика привода РПД-28 представлена на рисунке 2.9.
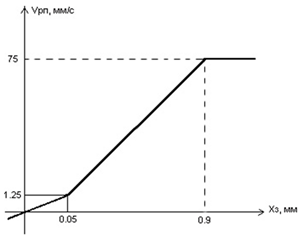
Рисунок 2.9
В соответствии с вышеизложенным была разработана функциональная схема работы типового канала управляющего привода, которая представлена на рис 2.8. Здесь показаны все элементы для одного работающего канала привода и ВСК (встроенная система контроля) сервопривода (ЭГУ), включающей адаптивную электронную модель с монитором контроля (отключение неисправного канала производится при расхождении выхода модели и сигнала обратной связи золотника ЭГУ за пределы порога на время более 0,05 с (определяется временной задержкой ВСК). При этом отличаются обмотка управления ЭГУ и снимается сигнал с ЭКГ. После этого происходит автоматическое включение второго канала привода (автоматически включается в работу вторая обмотка ЭГУ)
Ниже представлены материалы подтверждающие работоспособность привода РПД-28.
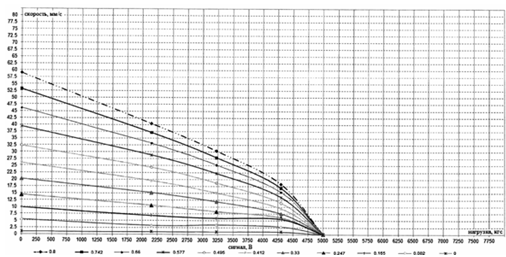
Рисунок 2.10 – Нагрузочная характеристика привода РПД-20 “внутрь”, РН=280 кгс/см2.
Переходный процесс
При входном сигнале соответствующему 1,63В
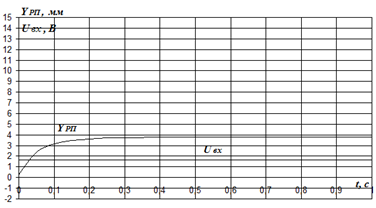
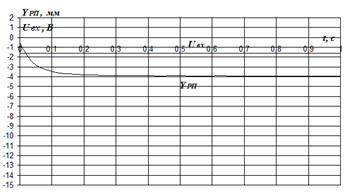
Рисунок 2.11 - Переходный процесс
При входном сигнале соответствующему -1,63В
Материалы о транспорте:
Организация и технология работы монтажного
отделения
Монтажное отделение размещают в чистом, светлом, сухом и изолированном помещении с температурой в холодный период года +17+230С, в теплый период года +16+270С. Монтаж колесных пар проходит в монтажно ...
Определение критической скорости по опрокидыванию
Критическая скорость по опрокидыванию определяется по следующей формуле: , м/с; где B – колея, м; (B=1,65 м); R – радиус поворота, м. Расчет проводим для гружёного и порожнего автомобиля при радиусе ...
Теоретико-метологические осмысления безопасности на железной дороге
Порядок пользования пассажирами железнодорожным транспортом определен Законом Республики Беларусь «О железнодорожном транспорте», Уставом железнодорожного транспорта общего пользования и ведомственны ...
Навигация
- Главная
- Устройство и эксплуатации железнодорожного пути
- Многоковшовые экскаваторы
- Антикоррозийная обработка
- Международные транспортные коридоры
- Интеллектуальные транспортные системы
- Автомобильные бензины
- Материалы
- Карта сайта