Стендовые испытания в части управления элеронами при действии внешней нагрузки и уровней давления в гидросистеме
Перед проведением испытаний рулевого привода РПД-28 было уточнено программное обеспечение модульного комплекса управления (МКУ), реализующего алгоритмы системы в части управления элероном для обеспечения проверки заданных в ТЗ параметров привода и приведения ПО в соответствие с уточненными алгоритмами управления. Внешний вид пульта МКУ приведен на Рисунке 3.8.

Рисунок 3.8 – Внешний вид цифрового пульта МКУ управления приводом РПД-28
Нагружение внешнего штока привода осуществлялось системой нагружения стенда НИМ ЦАГИ в полосе частот f=0,1÷30 Гц и воспроизводимых усилий до 2 тс.
Внешний вид РПД-28, установленного на силовозбудителе стенда представлен на Рисунке 3.9.

Рисунок 3.9 – Внешний вид РПД-28, установленного на силовозбудителе НИМ
Результаты автономных испытаний:
Статическая характеристика привода
Статическая характеристика привода снималась при подаче сигнала управления, соответствующего перемещению выходного звена на ход ±27,5мм.
Характеристики позиционирования выходного звена носят практически линейный характер. Во всем диапазоне управляющих сигналов. Нелинейность статической характеристики не превышает 1,04%.
Чувствительность привода
Чувствительность привода оценивалась при подаче входного сигнала 0,2% от максимального управляющего сигнала (0,055мм – по перемещению выходного звена).
Результаты испытаний показали, что чувствительность привода оценивается величиной не грубее 0,2% от максимального управляющего сигнала, что соответствует требованиям ТЗ на разработку.
Скоростная характеристика привода. Максимальная скорость по выходному звену привода
Скоростная характеристика привода – зависимость скорости выходного звена гидродвигателя (UРП) от перемещения золотника ЭГУ – была получена в диапазоне перемещения золотника |хзол| ≤ ±0,8мм (|UвхЭГУ| ≤ ±4В) и давлении нагнетания РН=280кг/см2.
Анализ характеристик VРП=f(хзол) показывает:
В области малой чувствительности привода нелинейность типа «зона нечувствительности» по скорости выходного звена отсутствует, а сама зависимость VРП=f(хзол) в этой зоне аппроксимируется линейной с коэффициентом наклона КМV0≈35с-1 с шириной полузоны |х0| ≤0,063 мм.
При увеличении перемещения золотника |хзол|>|х0| коэффициент наклона скоростной характеристики стремится к своей максимальной величине КVХ≈166 с-1.
Коэффициенты наклона КVХ0 и КVХ определяют изменение эквивалентной добротности внешнего контура привода, равной DРП=(5…20) 1/с, а их соотношение hРП= КVХ0/ КVХ≈0,21 определяет максимальную нелинейность скоростной характеристики привода.
Максимальная скорость выходного звена без нагрузки составляет 58,0мм/с – на уборку и 71,5 мм/с – на выпуск, что соответствует требованиям ТЗ на разработку (по ТЗ 60±15 мм/с).
Максимальная скорость привода при давлении нагнетания 280 кгс/см2 составляет на выпуск – 82,5 мм/с, на уборку – 61,5 мм/с.
Максимальное усилие, развиваемое выходным звеном и механическая характеристика привода
В процессе испытаний были сняты характеристики скорости выходного звена привода в зависимости от входного сигнала, подаваемого во внутренний контур привода, и от нагрузки на выходном звене при давлении нагнетания РН=280 кг/см2. По результатам замеров были построены скоростные характеристики привода, которые представлены на Рисунке 5.7, и механическая характеристика, которая представлена на Рисунке 3.10.
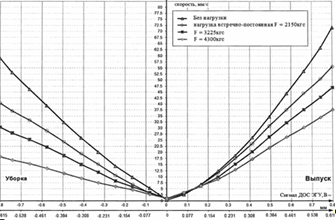
Рисунок 3.10 – Скоростная характеристика привода РПД-28 PН=280 кгс/см2
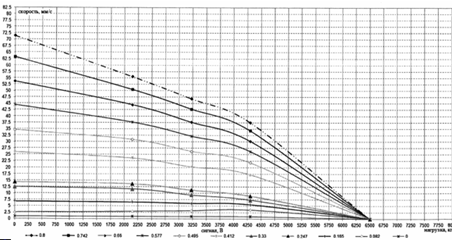
Рисунок 3.11 – Нагрузочная характеристика привода РПД-28 “наружу”, РН=280 кгс/см2
Значения максимальных скоростей привода от нагрузки при давлениях РН=280 кг/см2 представлены в Таблице 3.1.
Таблица 3.1
|
Нагрузка на выходном звене, кгс РН, кгс/см2 |
Максимальная скорость, мм/с | |
|
Выпуск |
Уборка | |
|
280 |
280 | |
|
2150 3225 4300 |
55 46,5 37,5 |
40 30 18 |
Максимальное усилие, развиваемое на выходном звене, составляет:
Материалы о транспорте:
Основные типы колесных тормозных механизмов
В тормозных системах автомобилей наиболее распространены фрикционные тормозные механизмы, принцип действия которых основан на силах трения вращающихся деталей о невращающиеся. По форме вращающейся де ...
Нормативные данные
В данном предприятии автомашины различных марок, в том числе ЗИЛ–131 – 3 шт. Техническое состояние автомашин на среднем уровне. Годовой плановый пробег одной автомашины – 45000 тыс.км. Периодичность: ...
Методика правки съемных деталей
Съемными деталями кузова, которые чаще всего страдают при аварии, являются капот двигателя, крышка багажника, двери, бамперы и крылья. Если стоимость ремонта ниже стоимости замены поврежденной детали ...
Навигация
- Главная
- Устройство и эксплуатации железнодорожного пути
- Многоковшовые экскаваторы
- Антикоррозийная обработка
- Международные транспортные коридоры
- Интеллектуальные транспортные системы
- Автомобильные бензины
- Материалы
- Карта сайта