Методика автономных проверок основных характеристик привода
где ![]() - токи трогания с учетом знака, мА.
- токи трогания с учетом знака, мА.
Токи трогания определять с помощью вольтметра универсального цифрового (В7-40) или другому прибору, обеспечивающему погрешность измерения не более 0,015 мА.
Аналогичным образом определить зону нечувствительности канала 2.
Смещение нуля определить как абсолютное значение полусуммы токов трогания
![]()
где ![]() - токи трогания с учетом знака, мА.
- токи трогания с учетом знака, мА.
Зона нечувствительности по каждому канала (по каждой обмотке ЭГУ) должна быть не более 0,8 мА.
Смещение нуля для каждого канала (по каждой обмотке ЭГУ) должно быть не более 6 мА.
Для определения характеристик привода при воздействии внешней нагрузки использовалась нагрузочная испытательная машина НИМ.
Установка НИМвключает в себя:
стойку нагружения;
стойку управления и автоматики;
стойку гидропитания.
На подвижной траверсе стойки нагружения установлен силовозбудитель на усилие до 25 тс.
На неподвижной траверсе устанавливается испытуемый рулевой привод. Шток рулевого привода закрепляется к штоку силовозбудителя через датчик силы.
На рисунке 3.4 представлена стойка нагружения с установленным на ней рулевым приводом.

Рисунок 3.4 - Стойка управления
Стойка гидропитания подготавливает рабочую жидкость для НИМ. В стойке установлены два фильтра грубой очистки и два фильтра тонкой очистки общим объемом 200 л. Фотография стойки гидропитания представлена на Рисунке 3.
НИМ имеет следующие технические характеристики:
развиваемое усилие до 25 тс;
ход штока ± 300 мм;
скорость перемещения штока 310 мм×с-1.
Воспроизведение усилия по частоте до 10 Гц – практически без ошибки. На частоте 10 Гц ошибка составляет ~ 10 кГ/мм×с-1.
На штоке силовозбудителя установлен датчик силы с тремя электрическими мостами, в плечи которых включены тензорезисторы. Сигналы с двух тензомостов поступают на усилители аппаратуры на несущей частоте (АНЧ). Третий тензомост является запасным.
Один из сигналов системы управления поступает на три входные электрогидравлические усилителя, соединенные параллельно, другой сигнал поступает на входы трех электрогидравлических усилителей, установленных в гидравлической обратной связи силовозбудителя и соединенных параллельно.
На данном этапе работы аналоговая система управления заменяется на цифровую, для этого на стенде зала 4С НИО-15 собран макет цифровой системы управления силовозбудителем без нарушения основных связей. На структурной схеме, представленной на Рисунке 4, показаны два варианта системы управления НИМ – аналоговый и цифровой. Макет цифровой системы показана на рисунке 3.5.

Рисунок 3.5
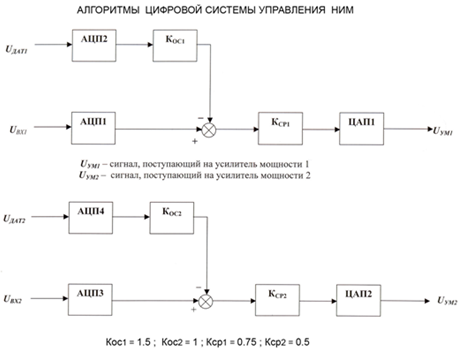
Рисунок 3.6
Электрическая схема подключения аналоговой части системы управления к цифровой представлена на Рисунке 6. Аналоговые источники сигналов подключены через платы АЦП ( L-264 ) к персональному компьютеру (ПК) и через платы ЦАП ( L-1208 ) фирмы Л-Кард к усилителям мощности.
Материалы о транспорте:
Устранение деформации шпатлевкой или оловом
Случается, когда удары вызывают повреждения в труднодоступных местах кузова, а иногда в совершенно недоступных или когда для ремонта поврежденного участка требуется большая разборка. Чтобы избежать д ...
Построение схемы разбивки стрелочного перевода
На основе полученных расчетов вычерчиваем эпюру стрелочного перевода в масштабе 1:100 по горизонтали и 1:50 вертикали. Вначале на чертеж наносим ось прямого пути перевода и отмечаем на ней центр пере ...
Разработка плана размещения оборудования, рабочих мест и определение
площади проектируемого отделения
Планировка роликового цеха предусматривает наиболее полное использование производственных площадей, обеспечи-вающих нормальные условия труда без потерь рабочего времени, поточность ремонтных операций ...
Навигация
- Главная
- Устройство и эксплуатации железнодорожного пути
- Многоковшовые экскаваторы
- Антикоррозийная обработка
- Международные транспортные коридоры
- Интеллектуальные транспортные системы
- Автомобильные бензины
- Материалы
- Карта сайта