Выбор типоразмеров гидроцилиндров и их привязка
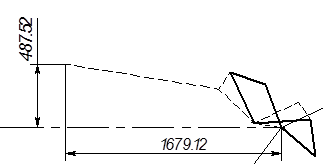
Рис. 8. Привязка гидроцилиндра привода ковша.
В приводе стрелы устанавливают либо один, либо два гидроцилиндра.
При подъеме рабочего оборудования стреловыми гидроцилиндрами одолеваются силы тяжести стрелы, рукояти, ковша, грунта в нем, гидроцилиндров привода рукояти и ковша, коромысла и тяги, а также собственных поршней со штоками.
Найдем суммарный рабочий объем гидроцилиндров привода стрелы:
где ![]() (кН), и
(кН), и ![]() (м) - сила тяжести и вертикальное перемещение центра масс i – го элемента рабочего оборудования или грунта.
(м) - сила тяжести и вертикальное перемещение центра масс i – го элемента рабочего оборудования или грунта. ![]() - определяется по схеме высотных перемещений центров масс элементов рабочего оборудования (рис. 9).
- определяется по схеме высотных перемещений центров масс элементов рабочего оборудования (рис. 9).
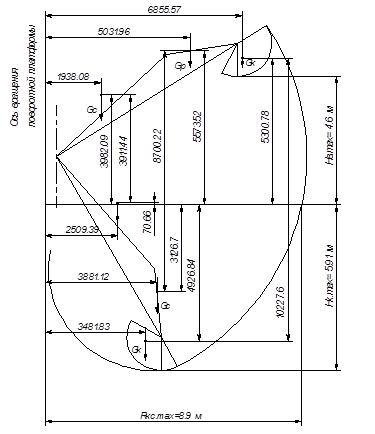
Рис. 9. Схема высотных перемещений центров масс элементов рабочего оборудования.
![]()
Рабочий объем одного гидроцилиндра равен:
По полученному рабочему объему выбираем гидроцилиндр (таб.4)
Таблица 4
|
Диаметр поршня D, мм |
140 |
|
Диаметр штока d, мм |
90 |
|
Наружный диаметр гильзы D1, мм |
168 |
|
Размер А, мм |
580 |
|
Площадь поршня F, см2 |
153,9 |
|
Рабочий объем W, л |
17.24 |
|
Ход поршня L, мм |
1120 |
|
Наружный радиус концевой проушины r, мм |
100 |
Предварительно гидроцилиндр привязывают к стреле. В качестве исходных данных используют полный угол поворота стрелы ![]() , длины L0 и L0 + Lп гидроцилиндра по концевым шарнирам соответственно с полностью втянутым и выдвинутым штоком, а также вероятное отношение моментов внешних сил относительно оси пяты стрелы
, длины L0 и L0 + Lп гидроцилиндра по концевым шарнирам соответственно с полностью втянутым и выдвинутым штоком, а также вероятное отношение моментов внешних сил относительно оси пяты стрелы ![]() в начале подъема рабочего оборудования из предельного нижнего положения (Мсн) и в конце подъема на максимальную высоту (Мсв). Используется нижняя часть схемы, представленной на рис.9. Суммарный момент сил тяжести относительно оси пяты стрелы определится как
в начале подъема рабочего оборудования из предельного нижнего положения (Мсн) и в конце подъема на максимальную высоту (Мсв). Используется нижняя часть схемы, представленной на рис.9. Суммарный момент сил тяжести относительно оси пяты стрелы определится как
![]() , кНм
, кНм
где ![]() и
и ![]() (м) - абсцисса и ордината центра масс i - го элемента рабочего оборудования или грунта, отсчитываемые соответственно от оси вращения поворотной платформы и от уровня стоянки экскаватора рис.9.
(м) - абсцисса и ордината центра масс i - го элемента рабочего оборудования или грунта, отсчитываемые соответственно от оси вращения поворотной платформы и от уровня стоянки экскаватора рис.9.
![]()
![]()
![]()
Момент сил тяжести и центробежных сил относительно оси пяты в верхнем положении рабочего оборудования (рис.8 верхнее положение) определится как
![]() , кНм
, кНм
где ![]() кН – центробежные силы,
кН – центробежные силы,
где ![]() - масса i -го элемента, т;
- масса i -го элемента, т; ![]() - угловая скорость поворотной платформы в конце разгона, ориентировочно принимаем
- угловая скорость поворотной платформы в конце разгона, ориентировочно принимаем
Материалы о транспорте:
Расчет затрат на запасные части и ремонтные материалы
Затраты на ремонтные материалы и запасные части определяют по нормам затрат на техническое обслуживание и текущий ремонт дорожной техники с учетом инфляции. Затраты на запасные части и материалы для ...
Порядок составления плана станции и перегона
Порядок составления плана станции. Подготовка плана станции. План станции вычерчиваем в масштабе 1:1000 на листе миллиметровой бумаге. Необходимую длину листа определяем в соответствии с заданной схе ...
Навигационно-гидрографический очерк
Плавание по морю вдали от берегов несложно, поскольку все опасности, за исключением некоторых затонувших судов, лежат между берегом и изобатой 10 м. Исключение составляет Таганрогский залив, где глуб ...
Навигация
- Главная
- Устройство и эксплуатации железнодорожного пути
- Многоковшовые экскаваторы
- Антикоррозийная обработка
- Международные транспортные коридоры
- Интеллектуальные транспортные системы
- Автомобильные бензины
- Материалы
- Карта сайта