Описание и обоснование выбранных схемотехнических решений и конструкций
Принципиальная гидравлическая схема, конструкция и принцип действия РП.
Рулевой привод выполнен по схеме РПД-000ГЗ (см. рисунок 1.2).
Конструктивно РПД-28 состоит из распределительного блока и гидродвигателя. РП работает от одной ГС.
Распределительный блок содержит:
а) двухканальный электрогидравлический усилитель мощности, включающий в себя:
двухобмоточный электромеханический преобразователь с двумя независимыми обмотками управления и гидроусилитель типа «сопло-заслонка» в первом каскаде усиления;
дросселирующий гидрораспределитель во втором каскаде усиления;
два индукционных датчика, формирующих в электронную часть сигнал обратной связи, пропорциональный перемещению золотника гидрораспределителя;
б) двухобмоточный электрогидравлический клапан;
в) фильтр, предохраняющий РП от загрязнений при монтаже трубопроводов гидросистемы;
г) обратный клапан на входе в привод;
Гидродвигатель содержит:
а) гидродвигатель - однокамерный гидроцилиндр с компенсационным штоком;
б) датчик, формирующий в электронную часть привода сигнал обратной связи, пропорциональный перемещению выходного звена и представляющий собой двухканальный потенциометр линейного типа, состоящий из двух резистивных элементов ЭР1-1М-1. Выходные цепи и цепи питания датчиков выведены поканально на соответствующие вилки электросоединителей.
в) два обратных клапана, обеспечивающих подпитку камер гидродвигателя в режиме демпфирования.
г) клапан включения-демпфирования, обеспечивающий:
- подключение рабочих полостей камеры гидродвигателя к полостям ЭГУ по гидрокоманде от электрогидравлического клапана;
- режим демпфирования при выключении электрогидравлического клапана или отказе гидросистемы;
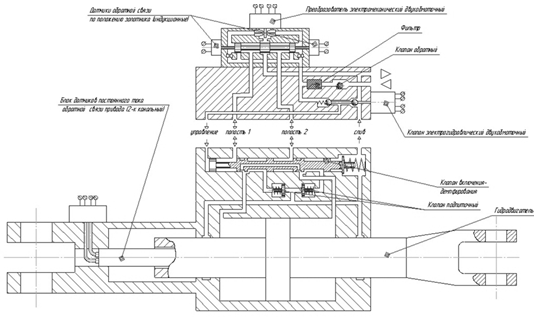
Рисунок 1.2 - Принципиальна гидравлическая схема привода РПД-28
Готовность привода к работе определяется подачей электропитания, а затем гидропитания элементов привода.
Напряжение питания от электронной части привода подается одновременно на ДОС ЭГУ, ЭГК и блок ДОС РП.
РП работает следующим образом:
рабочая жидкость из линии напора гидросистемы объекта через обратный клапан и фильтр поступает в электрогидравлический усилитель (ЭГУ) через ЭГК в полость управления клапана включения-демпфирования, золотник которого подключает ЭГУ к рабочим полостям гидроцилиндра;
При подаче в электромеханический преобразователь (ПЭМ) сигнала управления якорь ПЭМ и заслонка отклоняются на величину, пропорциональную сигналу. Отклонение заслонки приводит к изменению расхода через сопло и, соответственно, перепада давления под торцами золотника, золотник распределителя смещается от нейтрального положения в сторону, зависящую от полярности сигнала. На выходе ЭГУ появляются:
- расход рабочей жидкости, поступающий в соответствующую полость камеры гидродвигателя;
- сигналы обратной связи с датчиков ЭГУ, поступающие в электронную часть привода для компенсации сигналов управления на входе внутреннего контура.
Перемещаясь под действием перепада давлений, поршень гидродвигателя перемещает шток датчика обратной связи РП, который формирует в электронную часть привода два сигнала ОС, пропорциональных перемещению поршня, для компенсации входных сигналов из КСУ.
Под воздействием уменьшающихся сигналов управления, поступающих в преобразователи, золотник ЭГУ занимает нейтральное положение, перемещение поршня гидродвигателя прекращается.
При одном отказе в электрической части распределительного блока характер работы привода не изменяется, технические характеристики сохраняются. При втором отказе снимается электропитание с ЭГК. Перемещаясь под действием собственной пружины золотник клапана включения-демпфирования отключает полости обеих камер гидродвигателя от ЭГУ, соединяя их между собой через дроссель, что позволяет выходному звену привода перемещаться под действием внешней нагрузки с заданной скоростью (режим демпфирования).
Обоснование выбранной конструкции
Выбор принципиальной схемы.
По материалам отечественной и зарубежной печати прослеживаются следующие направления развития техники магистральных следящих гидроприводов:
а) дальнейшее совершенствование статических и динамических характеристик,
б) повышение надежности рулевых агрегатов управления до уровня, не уступающего надежности планера,
в) снижение энергопотребления гидроприводов,
г) разработка новых концепций гидроприводов (привод с минимальным числом каскадов усиления),
д) внедрение микропроцессоров в бортовых системах и следящих гидроприводах.
Необходимость разработки рулевых систем летательных аппаратов пятого поколения ставит перед проектировщиками рулевых приводов комплекс сложнейших научных, конструкторских и технологических проблем. Современные рулевые приводы должны:
а) отвечать жестким требованиям по надежности и отказобезопасности, обеспечивая рациональный уровень резервирования и высокую степень контролепригодности,
Материалы о транспорте:
Классификация многоковшовых экскаваторов
Экскаваторы являются основным типом землеройных погрузочно-разгрузочных машин, главным образом для разработки мягких горных пород в массиве или скальных в раздробленном состоянии. Основной рабочий ор ...
Расчет параметров датчика
Расчет выходных напряжений датчика обратной связи по выходному звену (ДОС РП) Исходные данные: 1 Параметры резистивного элемента ЭР1-1-1´90 1кОм (см. Технические условия АЖЯР.434215.016 ТУ). - ...
Расчет основных расходов
В основных расходах завода наибольшую долю занимают из – держки, планируемые на экипировку, обслуживание и текущий ремонт грузовых и пассажирских вагонов; затраты на деповской ремонт грузовых и пасса ...
Навигация
- Главная
- Устройство и эксплуатации железнодорожного пути
- Многоковшовые экскаваторы
- Антикоррозийная обработка
- Международные транспортные коридоры
- Интеллектуальные транспортные системы
- Автомобильные бензины
- Материалы
- Карта сайта