Разработка конструкции виброплит
Принимается lкл = 1,35 м.
Режим виброобжатия балласта
К параметрам, характеризующим режим виброобжатия балласта, относятся: амплитуда Sa и частота колебаний f , скорость обжатия балласта Vобж .
Для обеспечения наивысшего эффекта уплотнения значение Sa , f, Vобж должны находиться между собой в определённом соотношении [1].
Рекомендуемые значения амплитуды Sa , частоты колебаний f скорость обжатия Vобж находятся в пределах: Sa = 6 … 8 мм, f = 25 . 40 Гц, Vобж = 70 …120 мм/с .
Предварительно принимается: Sa = 6 мм, f = 30 Гц.
Vобж = Vм·tg α,
Vобж = 0,277·tg 8˚ = 0,039 м/с = 39 мм/с .
Должно выполняться условие:
![]() ; (2.7)
; (2.7)
![]() - условие выполняется.
- условие выполняется.
Окончательно принимается: Sa = 6 мм, f = 30Гц, Vобж=39мм/с.
Корпус плиты
Основная цель компоновки корпуса плиты – это определение его возможных размеров, с учётом которых разрабатывается возбудитель колебаний.
Определению подлежат: высота корпуса HК, длина LК и ширина BК (рисунок 2.1).
Высота корпуса HК переменна по его длине и определяется габаритными размерами вибровозбудителя, необходимостью расположения шарнирных соединений рессорных комплектов с плитой.
В первом приближении принимается:
![]() ,
,
![]() ,(2.8)
,(2.8)
где LК – длина корпуса, м (конструктивно принято Lk=1,6 м); γ – угол наклона нижней стенки плиты к горизонтальной плоскости, град (γ=2˚).
![]() .
.
Ширина корпуса BК определяется исходя из необходимости обеспечения безопасности производства работ при подбивке шпал со стороны междупутья.
Максимально возможная ширина корпуса ровна:
![]() , (2.9)
, (2.9)
где BМ – максимально допустимый вылет исполнительных органов в сторону междупутья, м (BМ=2,050 м); Lшп – длина шпалы, м (Lшп=2,75); вК – вылет клина относительно корпуса плиты, м (вk = - 0,085 м); δ – заход клина под торцы шпал, м (δ= - 0,17 м).
![]() .
.
Конструктивно принято Bк = 0,35 м.
В процессе разработки возбудителя колебаний размеры корректируются.
При транспортировке машины плита не должна выходить за приделы габаритов подвижного состава.
Эскизная компоновка корпуса виброплиты показана на рисунке 2.3.
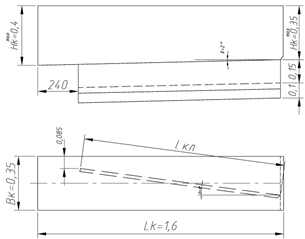
Рисунок 2.3 - Эскизная компоновка корпуса виброплиты
Разработка возбудителя колебаний
Для дебалансного возбудителя рассчитывается требуемая вынуждающая сила FВ и, соответственно, конструкция дебалансов, обеспечивающих колебания виброплиты, с заданной амплитудой.
При вращении дебалансов с угловой частотой ω и амплитудой Sa суммарная вынуждающая сила составит:
![]() , (2.10)
, (2.10)
где mn – приведенная масса колеблющихся элементов, кг; ωo – частота свободных колебаний плиты с учётом жёсткости балласта, с-1; h – коэффициент демпфирования, с-1.
Находим mn:
mn = an ·m, (2.11)
где m –масса корпуса плиты с вибровозбудтелем, кг (m = 400 кг); aп – коэффициент приведения (aп=1,15 [1]).
mn = 1,15·400=460 кг.
Находим ωo:
 ,(2.12)
,(2.12)
где Cр – приведенный коэффициент жёсткости рессорной подвески (принят Cр = 1·106 Н/м); Cб – приведенный коэффициент жёсткости балласта, Н/м.
Cб = Cуд ·Z ·a · l , (2.13)
где Z – заглубление под шпалу, м (Z=0,1 м); a – толщина клина, м (a=0,1 м); l – длина клина, м (l=1,35 м); Cуд – удельный коэффициент жёсткости балласта, Н/м4 , принимается по графику, при:
Материалы о транспорте:
Перечень оборудования колесно-роликового цеха до реорганизации
Таблица 3 - Оборудование колёсно-роликового цеха № п/п Наименование оборудования Фактическое наличие Год изготовления Где установлено 1 2 3 4 5 1 Козловой кран г/п 5 т 1 1979 Колесный парк 2 Моечная ...
Удельные суммарные силы
Расчет проведем для значения угла φ=3700 п.к.в. Удельная суммарная сила, сосредоточенная на оси поршневого пальца, определяется суммированием удельной газовой силы и удельной силы инерции: ; [4. ...
Предварительный расчет массы РП
Расчет производился по компьютерным данным по предварительной компоновке привода. Результаты предварительного расчета массы привода и основных составляющих узлов даны в таблице 2.2. Таблица 2.2 Наиме ...
Навигация
- Главная
- Устройство и эксплуатации железнодорожного пути
- Многоковшовые экскаваторы
- Антикоррозийная обработка
- Международные транспортные коридоры
- Интеллектуальные транспортные системы
- Автомобильные бензины
- Материалы
- Карта сайта