Определение параметров дороги расчетами
Число полос движения определяется из сопоставления ожидаемой часовой интенсивности движения по дороге и пропускной способности одной полосы движения по формуле:
![]()
где n – число полос движения;
Nч - часовая интенсивность движения, авт./час;
Nп - пропускная способность полосы движения, авт./час.
С учетом неравномерности движения в течение суток:
Nч=N/10=2911/10=291,1 авт/час
Пропускной способностью полосы движения называется количество автомобилей, которые могут проехать по ней в течение одного часа при обязательном условии обеспечения безопасности движения. В курсовой работе используется упрощенная динамическая модель транспортного потока, согласно которой автомобили перемещаются по полосе движения друг за другом, без обгона и с постоянной скоростью.
В этом случае пропускную способность полосы движения можно определить по формуле:
 авт/час.,
авт/час.,
Где v = 100 - расчетная скорость движения, км/час;
0,5- коэффициент сцепления;
f = 0,02 - коэффициент сопротивления качению;
l2 = 15 - длина автомобиля, м;
lо = 10- запас расстояния, м;
Кэ = 1,4- коэффициент эксплуатационного состояния тормозов.
Определение ширины проезжей части, полосы движения и земляного полотна
Ширина проезжей части b вычисляется по формуле:
b = bп n = 3,55 2 = 7,1 м.,
где bп - ширина полосы движения, м (рис. 1.1)
n = 2 - количество полос движения.
Ширина полосы движения:
bп = а + 2 х =2,75 + 2 0.4 = 3,55 м.,
где а = 2,75 - ширина кузова автомобиля, м;
х - расстояние от кузова до обочины или смежной полосы движения, м;
Величина х устанавливается по эмпирической зависимости:
х = 0.004 v = 0.004 100 = 0,4 м
Ширина земляного полотна:
В = b + 2 t = 7,1 + 2 2,5 = 12,1 м.,
где t = 2,5 м - ширина обочины, принимаемая по СНиП.
земляной водопропускный перегон дорожный
Определение наименьших радиусов кривых в плане
Проезжая часть автомобильной дороги на кривой в плане может иметь либо двухскатный поперечный профиль, либо односкатный, называющийся виражом. Наименьший радиус кривой в плане, при котором применяется двухскатный профиль при данной расчетной скорости движения находится по формуле:
![]()
где n = 0,1 -коэффициент сцепления колеса с дорогой в поперечном направлении;
in = 20 ‰ - поперечный уклон проезжей части.
При назначении радиусов поворота, меньших RH , необходимо предусматривать устройство виража. При значительном уменьшении радиуса поворота центробежная сила возрастает настолько, что вираж уже не обеспечивает устойчивости автомобиля против бокового скольжения. Это наименьшее значение радиуса поворота автомобильной дороги с виражом вычисляется по формуле:
![]() ,
,
где iB = 40 ‰ - уклон виража (СНиП, п.3.18).
При устройстве виража длина отгона L определяется по выражению:
![]() ,
,
где i пр = 0.02 -дополнительный продольный уклон отгона виража (СНиП, п.3.29).
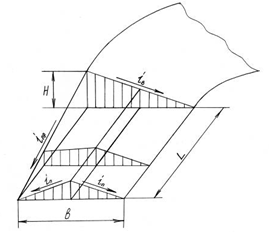
Рис. 1.2 Схема отгона виража
Видимость пути
Для обеспечения безопасности движения с расчетной скоростью водитель должен видеть дорогу на определенном расстоянии, называемом расстоянием видимости поверхности дороги (рис. 1.3), которое равно:
SВД = l1+ST+l0 = 27,8 + 106 + 10 = 143,8 м
где l1=v/3,6 - путь, проходимый автомобилем за время реакции водителя, равное 1сек;
Sт - длина тормозного пути:
lо - запас расстояния (5-10м)
![]()
Определение наименьших радиусов вертикальных кривых
Наименьший радиус выпуклой кривой устанавливается из условий видимости дороги
Материалы о транспорте:
Упрощенное рассмотрение динамики движения вертолёта
Основой для вывода и использования упрощенных уравнений движения вертолёта является допущение о замене несущего винта с его сложной динамикой – равнодействующей силой. При этом предполагается, что ма ...
Ремонт съемных деталей кузова
Съемными называют детали, которые устанавливают на каркас кузова и крепят болтами. К ним относятся: бамперы или щитки, решетка радиатора, капот, крышка багажника, двери и крылья (если они съемные). С ...
Разработка
технологического процесса
Перед разработкой технологического процесса восстановления детали выбираю базы. Проводим основные операции по подготовке детали к восстановления. Разрабатываем схему технологического процесса. Послед ...
Навигация
- Главная
- Устройство и эксплуатации железнодорожного пути
- Многоковшовые экскаваторы
- Антикоррозийная обработка
- Международные транспортные коридоры
- Интеллектуальные транспортные системы
- Автомобильные бензины
- Материалы
- Карта сайта