Определение коэффициента усиления усилителя мощности
Коэффициент усиления усилителя, генерирующего сигнал на управляющую обмотку исполнительного двигателя, определяется по формуле (16):
![]() (16)
(16)
где КРП – коэффициент передачи повышающего редуктора, который устанавливается в систему, если не удаётся обеспечить необходимую точность датчика (снижает ошибку измерения в КРП раз).
Схема системы, с точки зрения теории автоматического регулирования, представлена на рисунке 4, где Y(t) – выходной сигнал системы, воздействующий на объект регулирования.
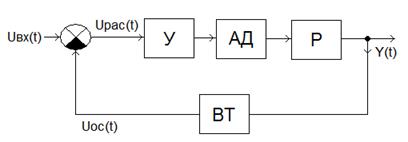
Рисунок 4 – Схема замкнутой системы
Передаточная функция замкнутой системы с отрицательной обратной связью имеет вид:
 (17)
(17)
где W – передаточная функция основного контура, WОС – передаточная функция контура обратной связи.
Построить переходный процесс по передаточной функции возможно с помощью программы моделирования, например пакета Matlab. В представлении Simulink, схема для получения переходной характеристики изображена на рисунке 5.
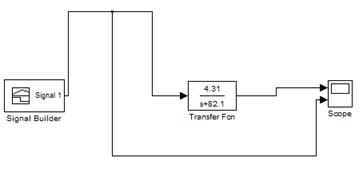
Рисунок 5 – Модель системы
Результат моделирования представлен на рисунке 6 – верхний график является переходной функцией (реакцией), нижний – единичной ступенчатой функцией (воздействием).
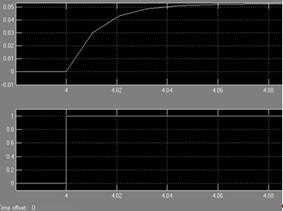
Рисунок 6 – Результат моделирования
Переходный процесс, представленный на верхнем графике рисунка 6, имеет следующие параметры: установившееся значение выходной величины ![]() = 0,052 рад (относительно нулевого уровня – угла до воздействия единичной ступенчатой функции), время переходного процесса (с учётом инженерного критерия определения факта окончания переходного процесса – попадание выходной величины в 5% зону от установившегося значения)
= 0,052 рад (относительно нулевого уровня – угла до воздействия единичной ступенчатой функции), время переходного процесса (с учётом инженерного критерия определения факта окончания переходного процесса – попадание выходной величины в 5% зону от установившегося значения) ![]() = 0,044 сек, постоянная времени
= 0,044 сек, постоянная времени ![]() = 0,012 сек.
= 0,012 сек.
Средняя скорость системы:
![]() (18)
(18)
судно вал двигатель аппроксимация
Ускорение системы при её пуске определено с помощью диффиринциаторов в модели Simulink

Рисунок 7 – схема для получения значения ускорения
В момент времени 0,0001 сек, ускорение пуска достигает 147 град/с2.
По результатам расчёта элементов системы, было выполнено её моделирование, и был получен переходный процесс системы. Переходный процесс позволяет определить достигнуты ли динамические характеристики системы, определённые в техническом задании. Такое сравнение произведено в таблице 2.
Таблица 2 – Сравнительная таблица
|
Параметр качества |
Требование |
Достигнутый результат |
|
Установившаяся скоростная ошибка |
- |
- |
|
Скорость работы системы |
18 |
69,5 |
|
Ускорение пуска системы |
5 |
147 |
Все требования к системе были выполнены.
Материалы о транспорте:
Расчет действительных циклов работы двигателя
За период процесса впуска осуществляется наполнение цилиндра двигателя горючей смесью. Изменение давления в процессе впуска в двигателе приведено на рисунке 1.1. Рисунок 1.1 – Изменение давления в пр ...
Методы расчета основных
параметров процесса сгорания
Процесс сгорания сопровождается чрезвычайно сложными физико-химическими явлениями, которые развиваются в зависимости от большого числа трудно учитываемых факторов. Это обстоятельство очень усложняет ...
Требования промышленной санитарии
Наиболее опасные производственные вредности на постах ТО: - пары топливного бензина – образуются при выполнении ремонтных и регулировочных работ по приборам системы питания; - окись углерода (в соста ...
Навигация
- Главная
- Устройство и эксплуатации железнодорожного пути
- Многоковшовые экскаваторы
- Антикоррозийная обработка
- Международные транспортные коридоры
- Интеллектуальные транспортные системы
- Автомобильные бензины
- Материалы
- Карта сайта