Расчет пневматического привода
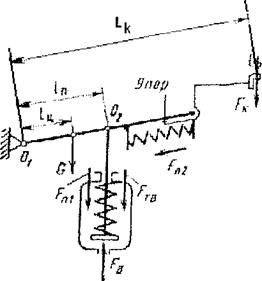
Кинематическая схема электропневматического контактора с обозначением действующих сил во включенном его состоянии и соответствующих им плеч
Целью расчета является определение основных параметров исполнительного органа пневмопривода, который срабатывает под воздействием распорядительного органа по сигналам электрической цепи управления, осуществляя рабочие перемещения подвижной системы. В качестве распорядительного органа обычно применяют электропневматические вентили включающего и выключающего типов.
Вывод расчетных соотношений базируется на кинематической схеме контактора /Рисунок 3.1. /. Определяющими состояние подвижной системы усилиями являются: FВ - сила давления сжатого воздуха, поступающего в цилиндр аппарата FП1 - сила отключающей пружины, размещенной в цилиндре, FТВ - сила трения поршня о внутренние стенки цилиндра, FК - сила реакции в точке касания силовых контактов, равная силе нажатия контактов, FП2 - сила притирающей пружины, G - вес подвижных частей контактора, приложенный в центр тяжести системы. Рассматриваем кинематическую схему контактора в статическом положении, в замкнутом состоянии контактов, когда процесс их притирания завершен.
Рисунок 3.1. - Кинематическая схема электропневматического контактора В целях упрощения не учитываем влияния сил трения в шарнирах контактора в виду их незначительной величины. Исключаем из расчета силу сжатия притирающей пружины FП2, так как при окончательном замыкании контактов положение контактодержателя фиксируется упором, и сила FП2 становится внутренней силой рычага.
Вывод расчетного уравнения и определение диаметра поршня dВ
Величина силы FШ, передающейся в процессе перемещения штока поршня на подвижный рычаг, может быть определена как разность между силой давления воздуха FВ и противодействующими ей FП1 и FТВ:
![]() (3.1)
(3.1)
Из условия равновесия подвижной системы сумма моментов сил относительно общего шарнира должна быть равна нулю:
![]() (3.2)
(3.2)
Здесь lП,lЦ и lК - расстояния от шарнира до линии действия соответствующей силы.
Разделив обе части равенства на плечо силы FШ, равное lП, получим:
![]() (3.3)
(3.3)
Таким образом, осуществляется приведение сил и моментов к линии действия некоторой базовой силы, в данном случае FШ, совпадающей с осью пневматического цилиндра.
Произведения G*(lЦ / 1П) = G' и FК *(1К / 1П) = F 'K называются приведенными значениями веса и нажатия контактов, причем коэффициент приведения, на который должна умножаться величина приводимой силы, равен отношению ее плеча к плечу базовой силы.
Отсюда FШ-G'-F'К=0. (3.4)
Подставив в это равенство выражение для величины FШ получим FВ-FП1-FТВ-G' - F'К =0. (3.5)
Вес подвижных частей контактора G зависит от его габаритов, которые непосредственно связаны с рабочим током, а следовательно с контактным нажатием FК.
Сила отключающей пружины FП1в сжатом состоянии должна обеспечить быстрое, за время 0, 03 .0, 06 с, отключение контактора. Кроме того при аварийных режимах, например, при протекании токов короткого замыкания, должно быть обеспечено размыкание взаимно приварившихся контакт деталей. Это условие является определяющим при расчете FП1. Для его реализации сила, разрывающая приварившиеся между собой контакты, должна как минимум вдвое превышать силу их нажатия при включенном контакторе F'К. Также должна быть преодолена сила трения покоя FТВO, превышающая примерно в 1,5 раза силу трения поршня о стенки цилиндра FТВ при движении. Однонаправленная с силой FП1сила тяжести G'способствует размыканию контактов. Следовательно, расчетное значение силы FП1может быть выражено равенством FП1=1,5*FТВ-G'+2* F'К(3.6)
Материалы о транспорте:
Методика расчета финансовых показателей от выполнения технических
обслуживаний сторонним организациям
Расчет цены за выполнение одного обслуживания Цто-1 Рент * Sто-1 Цто-1 = Sто-1 + ---------------, руб. 100 Рент = 40% 40 * 214,8 Цто-1 = 214,8 + --------------- =300,7 руб. 100 Количество обслуживани ...
Электромагнитный расчёт
Определение главных размеров. Главными размерами асинхронной машины являются внутренний диаметр статора и расчётная длина воздушного зазора . Главными они называются потому, что определяют в основном ...
Расчет и построение внешней характеристики двигателя
Для расчета внешней характеристики двигателя вначале определяют мощность необходимую для обеспечения заданной максимальной скорости по дороге с минимальным коэффициентом сопротивления качению. = =(0, ...
Навигация
- Главная
- Устройство и эксплуатации железнодорожного пути
- Многоковшовые экскаваторы
- Антикоррозийная обработка
- Международные транспортные коридоры
- Интеллектуальные транспортные системы
- Автомобильные бензины
- Материалы
- Карта сайта