Описание следящей системы
Схема следящей системы представлена на рисунке 1, где ЧО – человек-оператор, Ш – штурвал, У – усилитель (мощности), АД – асинхронный двигатель (исполнительный двигатель), Р – редуктор (понижающий), ОР – объект регулирования, ВТ – вращающийся трансформатор (датчик). Система функционирует следующим образом: уставка, задаваемая человеком-оператором с помощью штурвала, является входным сигналом UВХ; этот сигнал на элементе сравнения сравнивается с сигналом обратной связи UОС, и сигнал рассогласования UРАС = UВХ – UОС поступает на усилитель мощности, а с него – на управляющую обмотку исполнительного двигателя; исполнительный двигатель, через понижающий, редуктор воздействует на объект регулирования, вызывая его поворот на такой угол, чтобы устранить разницу между текущим углом поворота и углом поворота уставки; датчик угла поворота является источником сигнала обратной связи, прямо пропорционального существующему углу поворота объекта регулирования – этот сигнал идёт на элемент сравнения и вычитается из входного сигнала; при этом сигнал рассогласования будет неравен нулю, как только угол поворота объекта регулирования станет отличен от угла уставки, что вызовет работу исполнительного двигателя, который будет устранять это рассогласование между уставкой и текущим углом поворота.
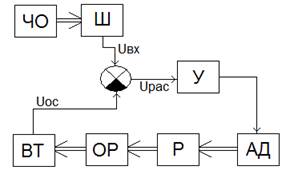
Рисунок 1 – схема следящей системы
Материалы о транспорте:
Перспективы развития транспортного комплекса Красноярского края
К концу 2010 года увеличение выручки от транспортных услуг ожидается в размере 190% к уровню 2003 года (2007 год — 142 %). В 2010 году выручка от услуг на авиационном транспорте составит 259 % к уров ...
Требования электробезопасности
Электрооборудование, электроинструменты, осветительные проборы (далее - электроустановки) должны отвечать требованиям действующих нормативных актов. Для непосредственного выполнения функций по органи ...
Расчет экономической эффективности
Годовой экономический эффект от внедрения определяется по формуле: Э = С1 – (С2 + Ен К); [cум] (4.2.1) где С1 и С2 – себестоимость затрат планируемого и базисного годов, сум. Ен = 0,15 – нормативный ...
Навигация
- Главная
- Устройство и эксплуатации железнодорожного пути
- Многоковшовые экскаваторы
- Антикоррозийная обработка
- Международные транспортные коридоры
- Интеллектуальные транспортные системы
- Автомобильные бензины
- Материалы
- Карта сайта