Синтез законов управления
Автоматическая стабилизация вертолёта по углу тангажа на режиме висения
На режиме висения и околонулевых скоростях зависимость угла тангажа от движения центра масс является слабой. Постоянная времени ![]() , соответствующая первому уравнению (2.20) на порядок больше постоянной времени
, соответствующая первому уравнению (2.20) на порядок больше постоянной времени ![]() . Следовательно, характерные для стабилизации короткопериодические движения по углу
. Следовательно, характерные для стабилизации короткопериодические движения по углу ![]() можно исследовать без учета
можно исследовать без учета ![]() .
.
Движение центра масс по вертикали также слабо влияет на ![]() , так как суммарная сила несущего винта в исходном режиме проходит приблизительно через центр масс и небольшие
, так как суммарная сила несущего винта в исходном режиме проходит приблизительно через центр масс и небольшие ![]() изменения ее величины при стабилизации вертолета по высоте слабо влияют на
изменения ее величины при стабилизации вертолета по высоте слабо влияют на ![]() . Поэтому для исследования стабилизации вертолета по углу тангажа система (2.20) 4-го порядка заменяется уравнением второго порядка:
. Поэтому для исследования стабилизации вертолета по углу тангажа система (2.20) 4-го порядка заменяется уравнением второго порядка:
![]() . (3.1)
. (3.1)
Закон управления шагом винта запишется в виде:
![]() (3.2)
(3.2)
В работе рассматривается управление общим шагом винта.
Структурная схема имеет следующий вид
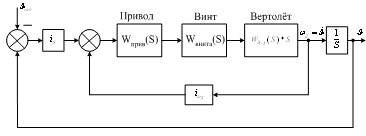
Рис. 3.1. Структурная схема управления.
![]() ;
;
 .
.
На режиме висения
![]()
![]() ;
;
![]() .
.
![]() ;
;
![]()
![]() ;
;
![]()
Ниже представлен сигнальный граф, соответствующий рассмотренной выше структурной схеме (Рис. 3.1):
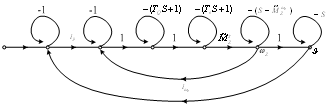
Рис. 3.2. Сигнальный граф.
![]() ;
;
![]() ;
;
 ; (3.3)
; (3.3)
![]() .
.
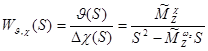
Основным звеном в замещающей схеме является третье с передаточной функцией второго порядка
![]() (3.4)
(3.4)
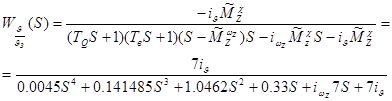
![]() (3.5)
(3.5)
Вид и время переходного процесса ![]() в основном определяются этим звеном. Два первых звена с малыми постоянными времени T1 и T2 описывают быстропротекающие переходные процессы и лишь незначительно изменяют проходящее через них управляющее воздействие
в основном определяются этим звеном. Два первых звена с малыми постоянными времени T1 и T2 описывают быстропротекающие переходные процессы и лишь незначительно изменяют проходящее через них управляющее воздействие ![]() .
.
Практически не влияя на вид суммарного переходного процесса, они вносят небольшое динамическое запаздывание, равное сумме постоянных времени этих звеньев:
Tп=T1+T2;
T1=0.0313;
T2=0.134.
Полное время переходного процесса (время регулирования) будет: ![]() , где
, где ![]() время переходного процесса основного звена (3.4). Передаточные числа
время переходного процесса основного звена (3.4). Передаточные числа ![]() находятся из передаточной функции основного звена (3.4). Напишем ее в виде:
находятся из передаточной функции основного звена (3.4). Напишем ее в виде:
 (3.6)
(3.6)
где ![]() - относительный коэффициент затухания,
- относительный коэффициент затухания,
![]() - коэффициент усиления,
- коэффициент усиления,
![]() ,
, ![]() .
.
Из сравнения коэффициентов знаменателей передаточных функций (3.5) и (3.6) и учитывая выражения для ![]() ;
; ![]() ;
; ![]() ;
; ![]() , находим формулы для расчёта передаточных чисел
, находим формулы для расчёта передаточных чисел ![]() ,
, ![]() :
:
Материалы о транспорте:
Правила классификации и постройки морских судов
Для перекачки топлива должно быть предусмотрено не менее двух насосов с механическим приводом, один из которых служит резервным [8]. Топливоперекачивающие насосы, а также насосы сепараторов, кроме ме ...
Охрана окружающей среды
В настоящее время запрещён спуск за борт сточных вод, нечистот, а также сброс разного рода твёрдых отбросов и мусора с судов, плавающих на реках, озёрах и водохранилищах с регламентированным санитарн ...
Морской и речной транспорт
Основными показателями, характеризующими речные и морские суда, являются водоизмещение, грузоподъемность, грузовместимость, размеры судов (длина, ширина, высота борта) и осадка в груженом и порожнем ...
Навигация
- Главная
- Устройство и эксплуатации железнодорожного пути
- Многоковшовые экскаваторы
- Антикоррозийная обработка
- Международные транспортные коридоры
- Интеллектуальные транспортные системы
- Автомобильные бензины
- Материалы
- Карта сайта