Упрощенное рассмотрение динамики движения вертолёта
Здесь Uф – объем эквивалентного тела вращения, проекция которого в плане совпадает с проекцией фюзеляжа в плане; Кф – поправочный коэффициент, зависящий от удлинения фюзеляжа l/D (l – длина, D – наибольший диаметр эквивалентного тела вращения). Эмпирическая зависимость Kф от l/D приведена на рис.2.2.
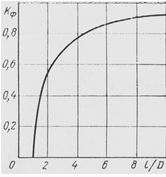
Рис. 2.2. График для определения коэффициента момента фюзеляжа
Для типичных вертолетных "обрубленных" фюзеляжей значение Kф, полученное из графика, следует уменьшить на 15-20%. Величина Δα0 – угол атаки фюзеляжа, соответствующий Mzф=0.
Величина Yст определяется по формуле
![]() , (2.8)
, (2.8)
где Sст – площадь стабилизатора; aст находится из выражения 
![]() , где
, где ![]() - удлинение стабилизатора; lст – размах стабилизатора;
- удлинение стабилизатора; lст – размах стабилизатора;
![]() , (2.9)
, (2.9)
где φст – угол установки стабилизатора; Δαст находится по формуле
![]() .
.
Полученные зависимости позволяют определить значения основных параметров, соответствующих установившимся режимам полёта вертолёта. Зависимости отклонения органов управления вертолёта от основных параметров полёта называются балансировочными кривыми. Оценим приближенно характер основных балансировочных кривых.
Для упрощения положим k=0. Тогда имеем
![]() (2.10)
(2.10)
![]() (2.11)
(2.11)
![]() (2.12)
(2.12)
Будем полагать углы α и υ малыми, тогда уравнения (2.5) приближенно запишутся в виде
![]() ; (2.13)
; (2.13)
![]() ; (2.14)
; (2.14)
![]() . (2.15)
. (2.15)
Первые два уравнения равновесия сил определяют положение эквивалентного несущего винта в пространстве. Их можно рассматривать независимо от третьего уравнения.
Действительно, уравнение (2.13) можно преобразовать к виду
![]() , (2.16)
, (2.16)
в котором оно не зависит от отклонения управления æ.
Положение же фюзеляжа вертолета в пространстве определяется уравнением равновесия моментов (2.15).
Материалы о транспорте:
Рейсовая документация
Порт отправления Поручение на отгрузку экспортного груза формы КЭ-2.1. – содержит данные о грузе и служит основанием для его приема. Погрузочный ордер подписывается судовой администрацией после погру ...
Процесс расширения
Показатель политропы расширения: Давление в конце расширения: МПа Температура в конце расширения: К Проверим правильность ранее принятой температуры остаточных газов: К % Допустимое значение 0,08%. Р ...
Охрана труда
Задание: Разработать мероприятия по снижению уровня шума и вибрации в кабине управления рабочими органами машины ВПО – 3 – 3000. Действие шума на организм человека. Нормирование шума Многочисленными ...
Навигация
- Главная
- Устройство и эксплуатации железнодорожного пути
- Многоковшовые экскаваторы
- Антикоррозийная обработка
- Международные транспортные коридоры
- Интеллектуальные транспортные системы
- Автомобильные бензины
- Материалы
- Карта сайта